Competition Map
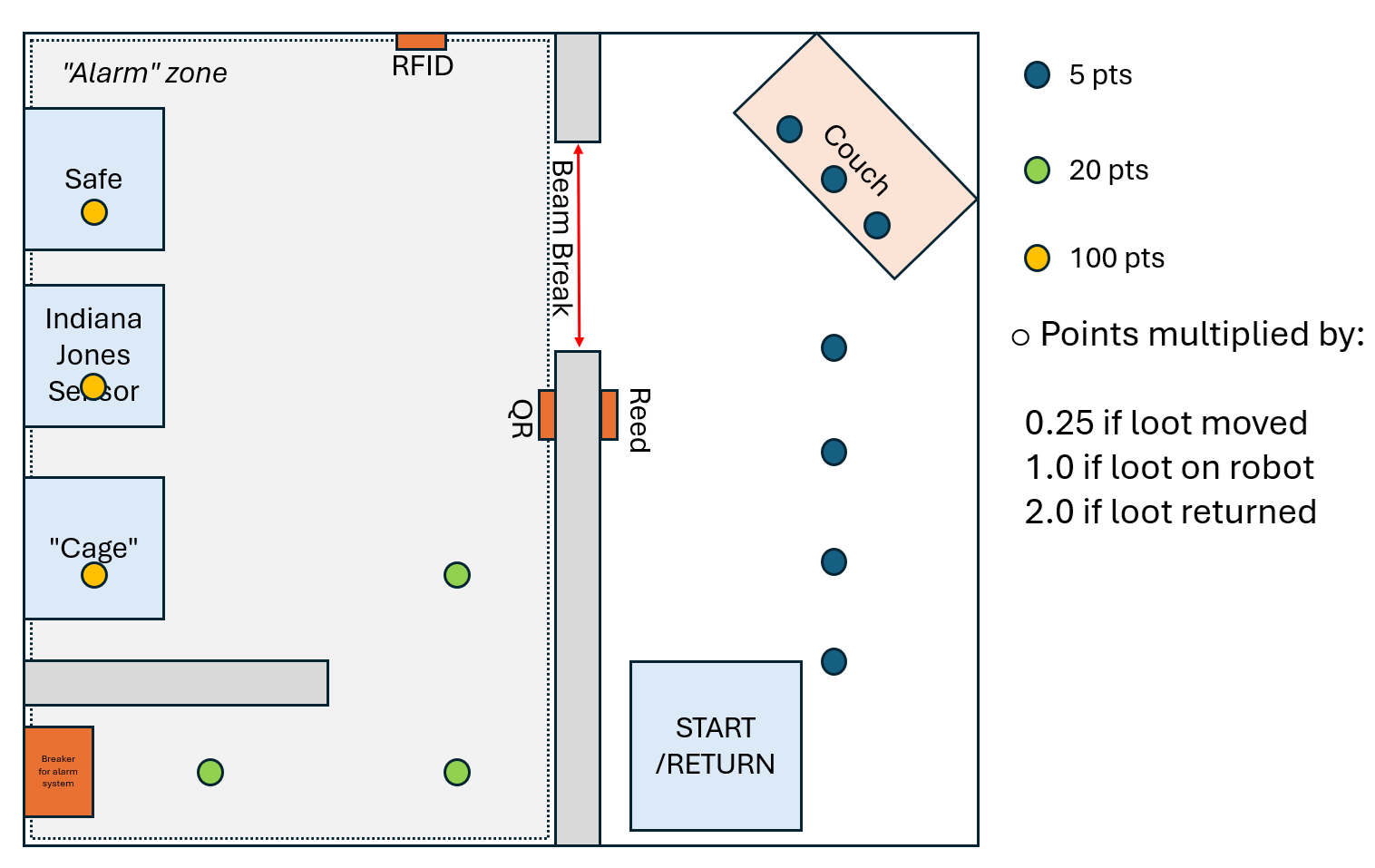
The image below shows the layout of the competition arena (NOT TO SCALE). Course is 8' x 8' in size.
Steal your way to a better grade.
The challenge is hosted in the John Lindsay Sr. Design Commons, which is upstairs of the Design Building (you can see a Virtual Tour for reference).
The challenge starts at 9:30AM on March 20, 2025. See full schedule below.
The Roboheist Challenge is the ECED3901 Design II class project at Dalhousie University for the Winter 2025 Semester. Students are challenged to steal "loot" from a course rife with detectors and obstacles. Students will need to build manipulators, learn about protocols and datasheets, and compete to collect as much loot without being detected or stopped.
The image below shows the layout of the competition arena (NOT TO SCALE). Course is 8' x 8' in size.
There is too much loot to grab at once. How can you pick it all up to maximize your points?
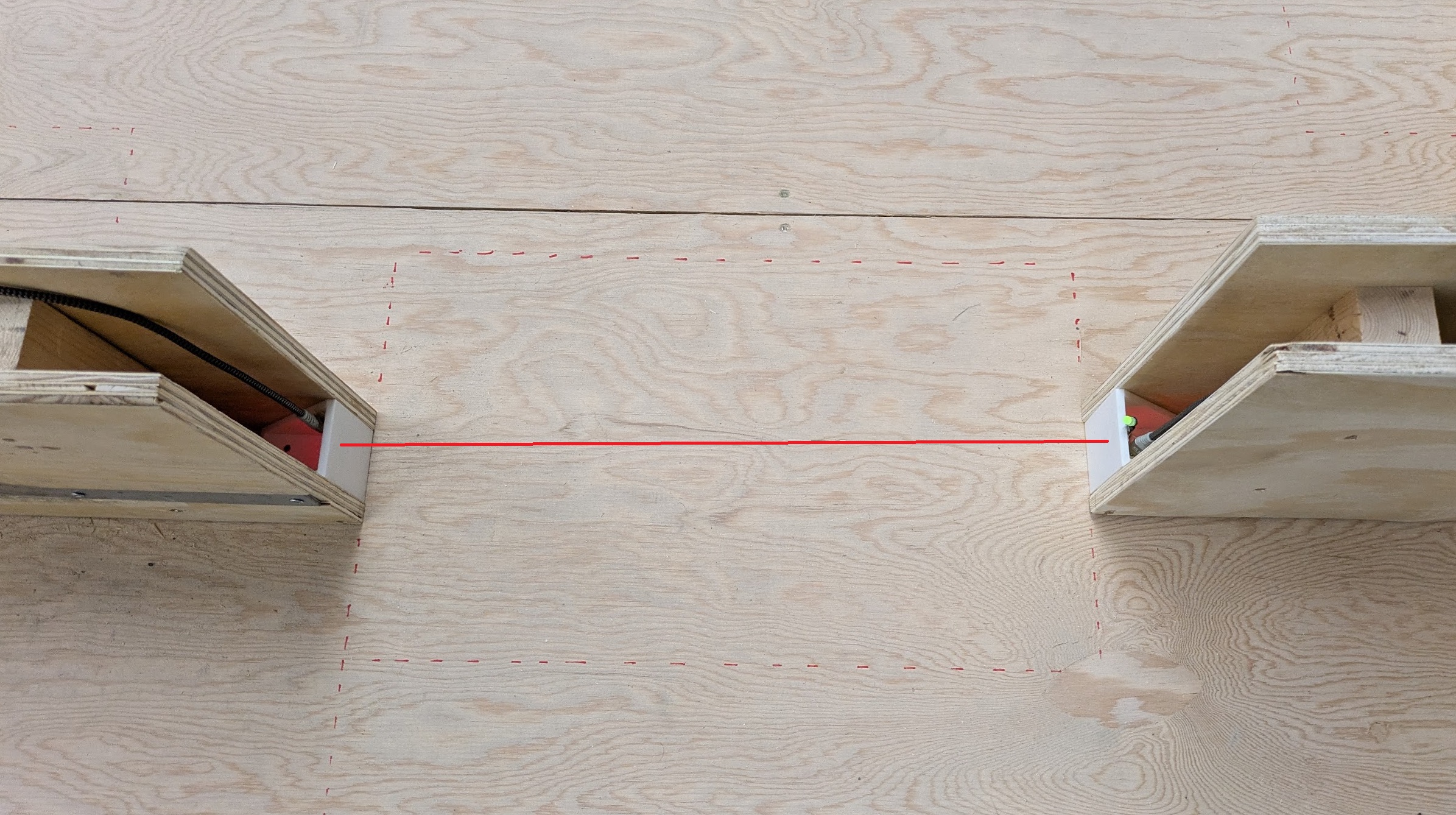
A high-security IR beam will detect entry into the secure zone. But maybe there are some flaws in the design, can the robots trick the system?

Loot is stored inside the safe. Can a robot manipulate the safe mechanism to unlock it?
The COLIN company has designed the advanced I.N.D.I.A.N.A Sensor with six laser beams, any disturbance of which will trigger a special alarm. Can the teams remove the loot without tripping the alarm system?

An ironclad safe protects some of the loot. The only way to open it is with a real commercial keycard system. Are these things as secure as they advertise?

An advanced alarm system protects the loot. But all systems need over-power protection, can the robots work to trip some of these systems and disable the alarm?
| Time | Group # (Name) | Notes |
|---|---|---|
| 9:30 | 1: The Mustang Mk. II | Final Slot |
| 9:50 | 2: Getty Bot | Final Slot |
| 10:10 | 3: LobsterX | Final Slot |
| 10:30 | 4 | Final Slot |
| 10:50 | 5 | Final Slot |
| 11:10 | — | Break (10 mins) |
| 11:20 | 6 | Final Slot |
| 11:40 | 7: SEVN-X | Final Slot |
| 12:00 | 8 | Final Slot |
| 12:20 | 9 | Final Slot |
| 12:40 | 10: Suzie the 3D Printer | Final Slot |
| 13:00 | — | Team-Only Lunch |
| 14:00 | 11: Emérro | Final Slot |
| 14:20 | 12 | Final Slot |
| 14:40 | 13: Johnny 13 | Final Slot |
| 15:00 | 14: PASCAL | Final Slot |
| 15:20 | 15: Ralphie Robot | Final Slot |
| 15:40 | — | Break (10 mins) |
| 15:50 | 16 | Final Slot |
| 16:10 | 17 | Final Slot |
| 16:30 | 18: Oreo | Final Slot |
| 16:50 | 19: Team 19 | Final Slot |
| 17:10 | 20 | Final Slot |
| 17:45 | — | Announcement of Winners |
Full rules are available here in PDF, note these are NOT official rules, official rules are available to students on Brightspace as the rules on this website may become out of date.

First place receives the unique trophy for their skillful demonstration, a certificate, a small cash prize, and the satisfaction of the things they learned and applied in ECED3901.
Second place receives a certificate, a smaller cash prize, and the satisfaction of the things they learned and applied in ECED3901.
Third place receives a certificate, a yet smaller cash prize, and the satisfaction of the things they learned and applied in ECED3901.
The course design is open-source and is available here.
The Design II Robot Competition was started by Dr. Peter Gregson (1951-2021), and this continued contest honours his legacy.
The current robot platform was designed by Dr. Vincent Sieben, this iteration of the course is being taught by Dr. Colin O'Flynn using Dr. Sieben's platform. Challenge design & construction thanks to Jordan Wright, Tyler Sieze, and Alex Pudsey. Day-of support possible thanks to ECED3901 Lab TAs (Brian Peters & Tori Ebanks), student support (James Vaughan), and ECED Support of Nicole Smith and Tamara Cantrill.
Thanks also to advice from Design II prior course instructors, Dr. Vincent Sieben & Matthew D'Entremont for support and advice!